Augmented Based Human Robot Interaction (2009 – 2010)
credit: ProFactor GmbH
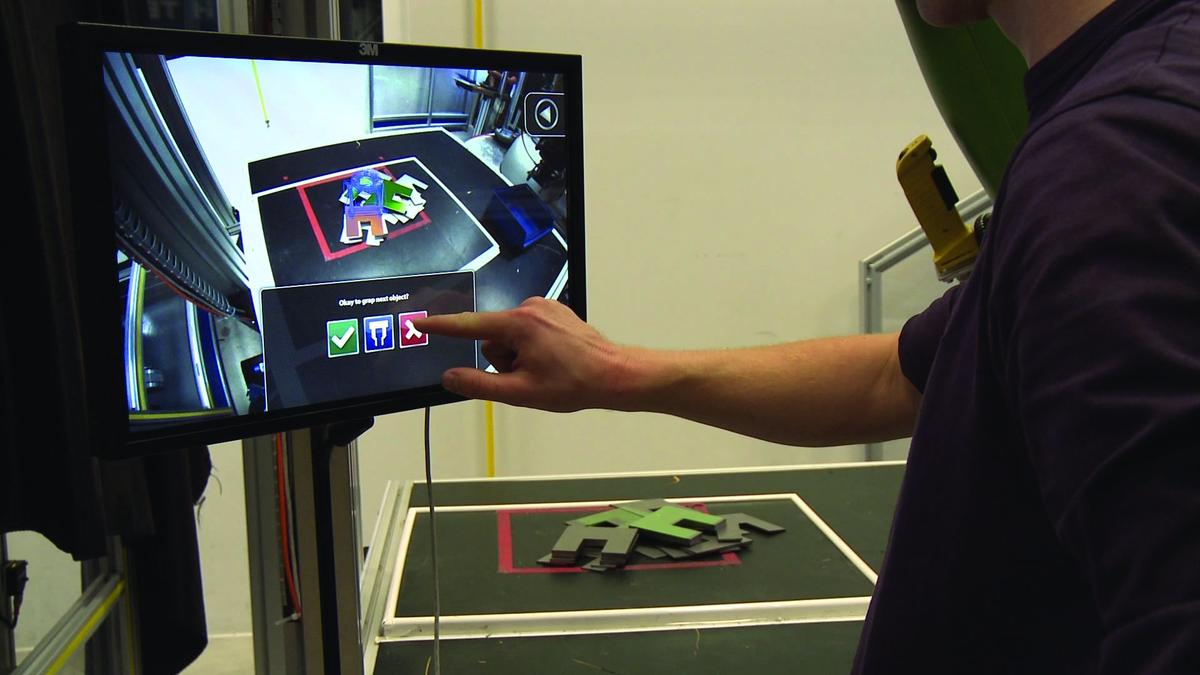
State of the art systems for programming industrial robots are trimmed for efficiency; however, the interfaces are highly complex and require in-depth domain knowledge, the means of programming is time-consuming and cumbersome. The objective of the FFG funded research project AHUMARI was to explore new human-robot interaction methods for controlling and programming industrial robots, including presentation of relevant process data via Augmented Reality, which is usually hidden to unknown to novices. Multi-modal programming and operation methods were evaluated, including optically tracked 3D sticks and speech input.
Context: 3-year FFG funded research project
Contribution: implementation of an adaptive spatial augmented reality display for large-scale environments using a MIDI-controlled moving-head projector, with situation-based control of pan/tilt/zoom/focus, implementation of multi-touch based programming interface for controlling robotic process
Credits: University of Applied Sciences Upper Austria, Profactor GmbH, FerRobotics GmbH, KUKA AG, Convergent Information Technologies GmbH
credit: ProFactor GmbH